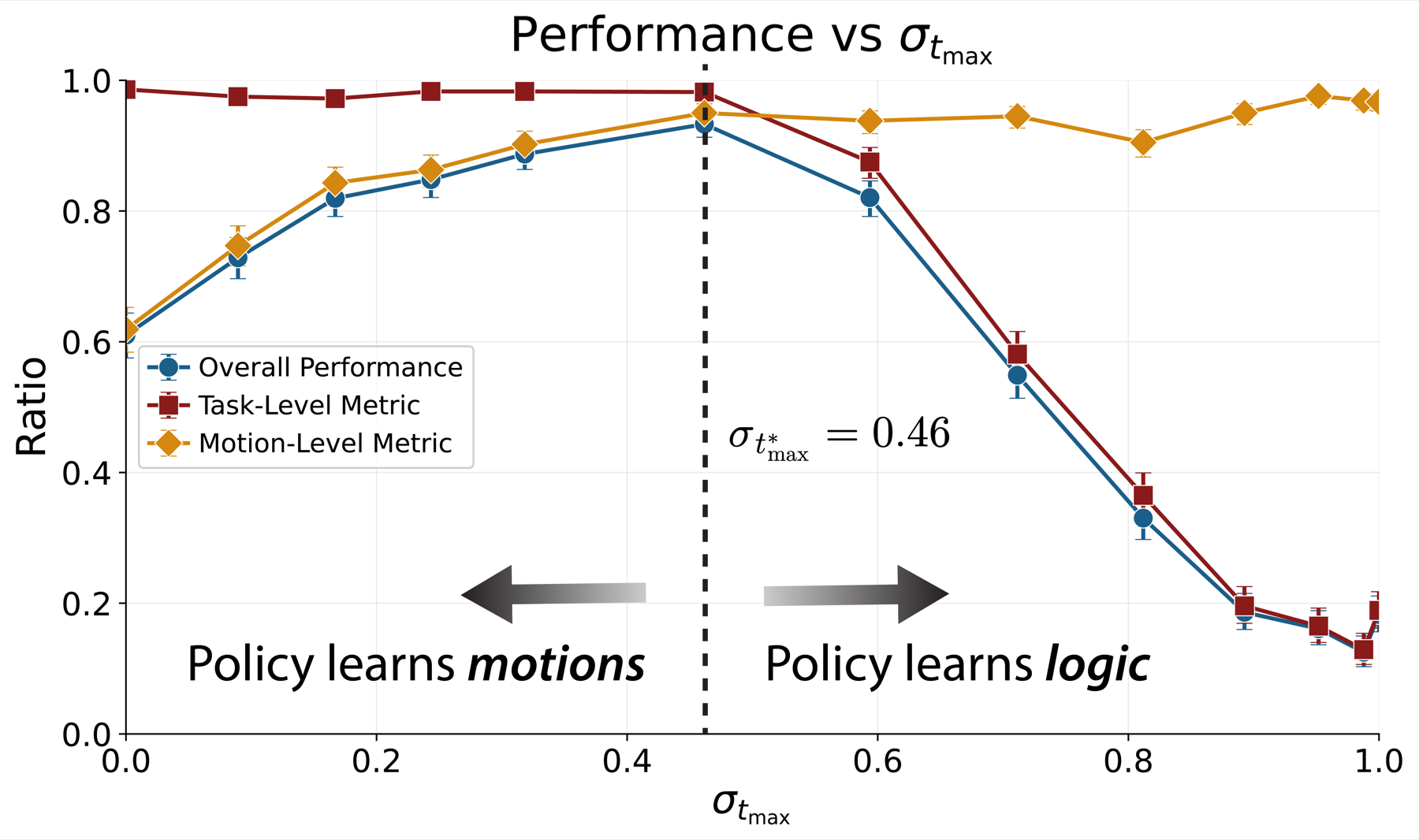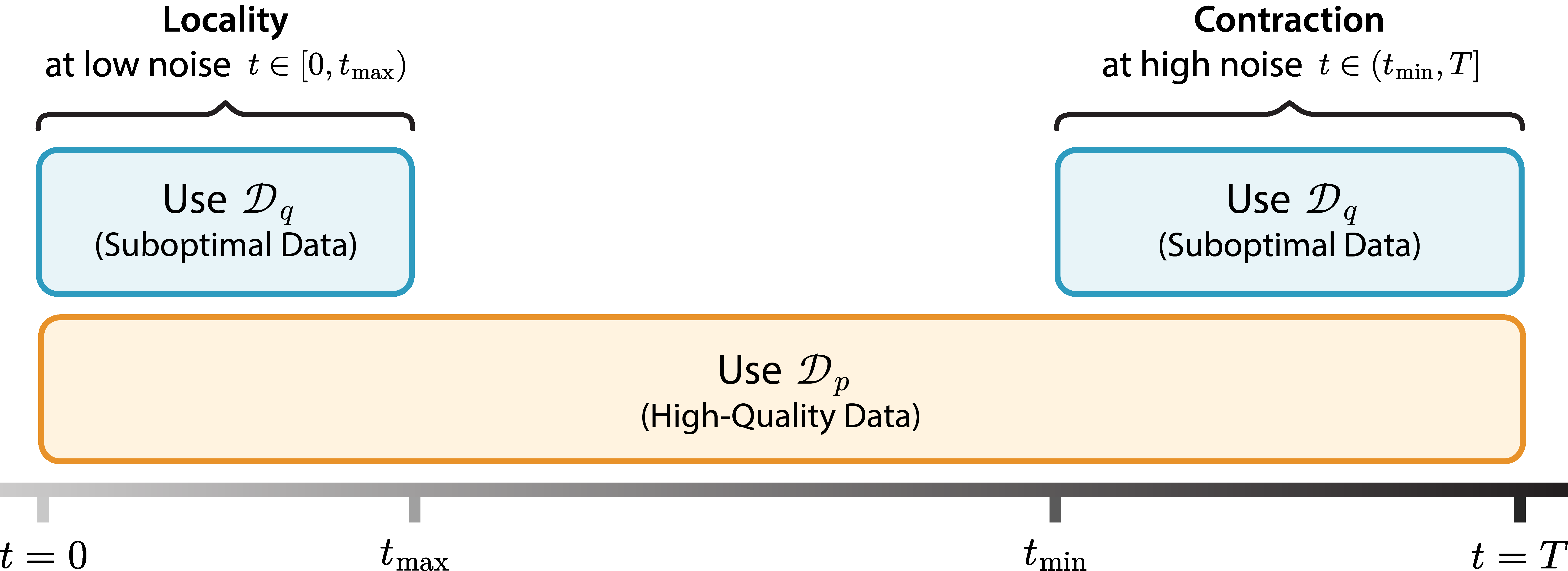
At low noise, the optimal denoiser only attends to a local temporal neighborhood around each action and ignores the global task structure. Thus, it is safe to learn motion primitives at low noise.
The low noise interval is best for suboptimal data with high-quality motions, but mismatched task descriptions.